The Convergence of
Science and Economy
The future of humanity is
overwhelmingly interesting
Overwhelming innovation, amazing ideas, and
even funny humor, interesting things are born
from the intersection of different elements.
Araya will integrate cutting-edge AI and neurotech into business and daily life.
We aim to create an overwhelmingly exciting future for workers,
researchers, and all people in their daily life.
BUSINESS
All things AI
In today’s world, where new technologies
emerge and are
shared daily, Araya unlocks the potential of cutting-edge AI
across various
aspects of business to create new value. Araya’s
AI work generates innovative solutions
that bridge the gap
between research
and society.
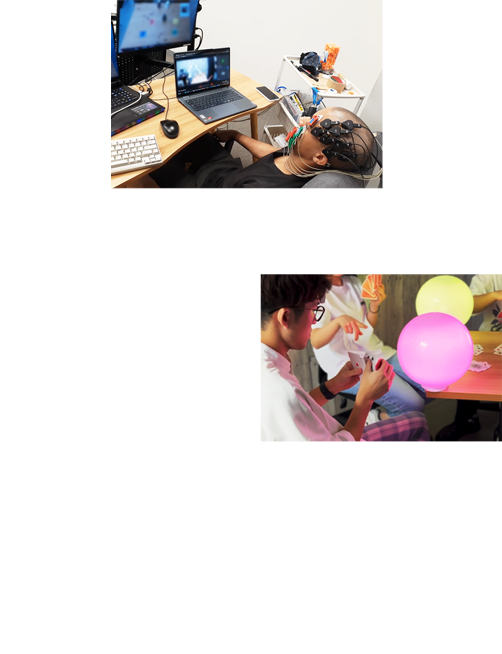
RESEARCH
Brain x AI for Humanity
- A New Step Forward
How does consciousness arise? How can we develop Brain-Machine
Interfaces (BMI) that connect humans and AIs? Through extensive
research, ranging from fundamental to applied studies, we strive to
enhance people’s lives by integrating our findings from both
academic and practical domains
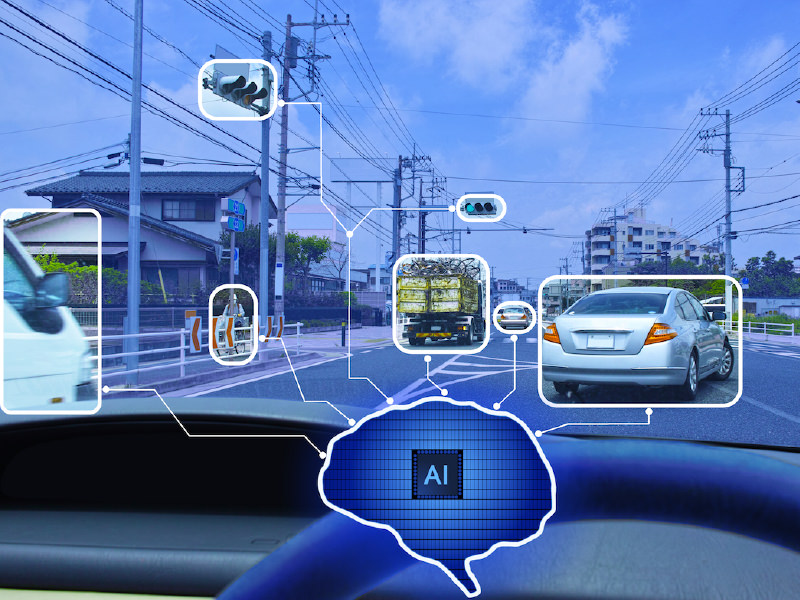
PROJECTS
Introduction to AI implementation,
development, and utilization cases
AI活用事例
インフラ点検における画像認識AI活用
AI活用事例
フォークリフトなどの車両と人の接触防止への画像認識AI活用
AI開発事例
商業施設・店舗におけるインストアマーケティング・顧客行動分析への画像認識AI活用
AI活用事例
自動車メーカー向けエッジAI開発におけるOFA(Once-for-All)適用
AI開発事例
AI/強化学習により空調の最適化を行い、快適性を維持しながら大幅な消費電力の削減を目指します
COMPANY
With AI and Neurotech,
the future of humanity
is overwhelmingly
interesting.
Backed by our expertise and proven advanced AI solutions, and with reliable neurotechnologies developed by our researchers, we will lead the way to an overwhelmingly interesting future.
At Araya, we are looking for passionate and driven individuals to join our team.
 Contact us
Contact us